The Sumo Robot Challenge
This challenge will use the vex system but will require a very different design, so I decided to make a separate project page for it. It works like an actual Sumo match. Two robots face off against each other. The first to get pushed out of the ring loses.
Inspiration
|
|
Designing a 3D-part |
My design
|
My Groups design
|
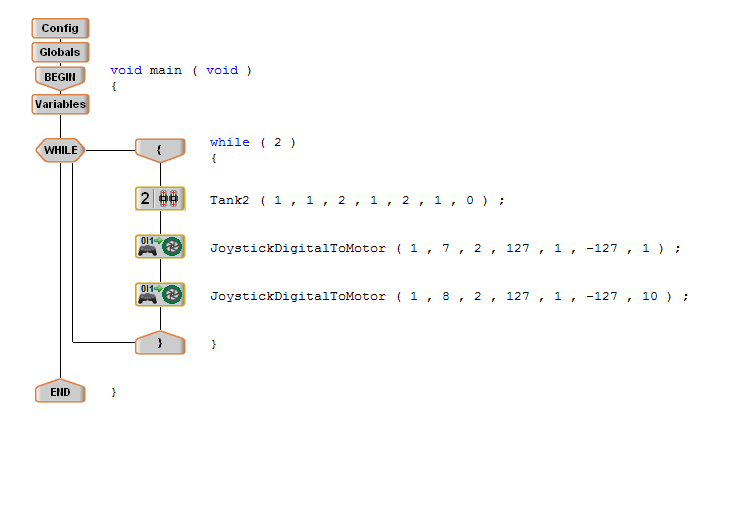
REMOTE CONTROLLEDThe Bot was controlled with a controller. It used joysticks for user control. The code is in a "while" loop. This means that while we press the joystick, this loop is activated. That then triggers the wheels. If the joystick is not pressed, the robot simple sits until the "while" loop is activated.
|
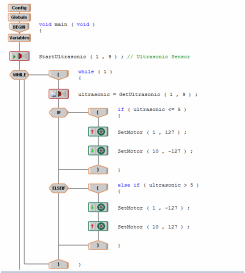
AUTONOMOUSThe bot was controlled using sensors that help it to see the other bot and take it down. It used an ultrasonic sensor: "An ultrasonic range finder sensor enables a robot to detect obstacles in its path by utilizing the propagation of high-frequency sound waves. The sensor emits a 40kHz sound wave, which bounces off a reflective surface and returns to the sensor. Then, using the amount of time it takes for the wave to return to the sensor, the distance to the object can be computed." The ultrasonic sensor allowed the robot to fight on its own. No user control was necessary. The code is set to immediately activate the ultrasonic sensor. So, this means that if the ultrasonic sensor sensed something less than eight inches away, it would trigger the "elseif" loop. This loop caused the wheels to move forward. If the ultrasonic sensor did not sense something, then it triggered the while loop. The while loop caused the wheels to spin in different directions, making the robot spin in a circle. This enabled it to have 360 degrees of vision.
|
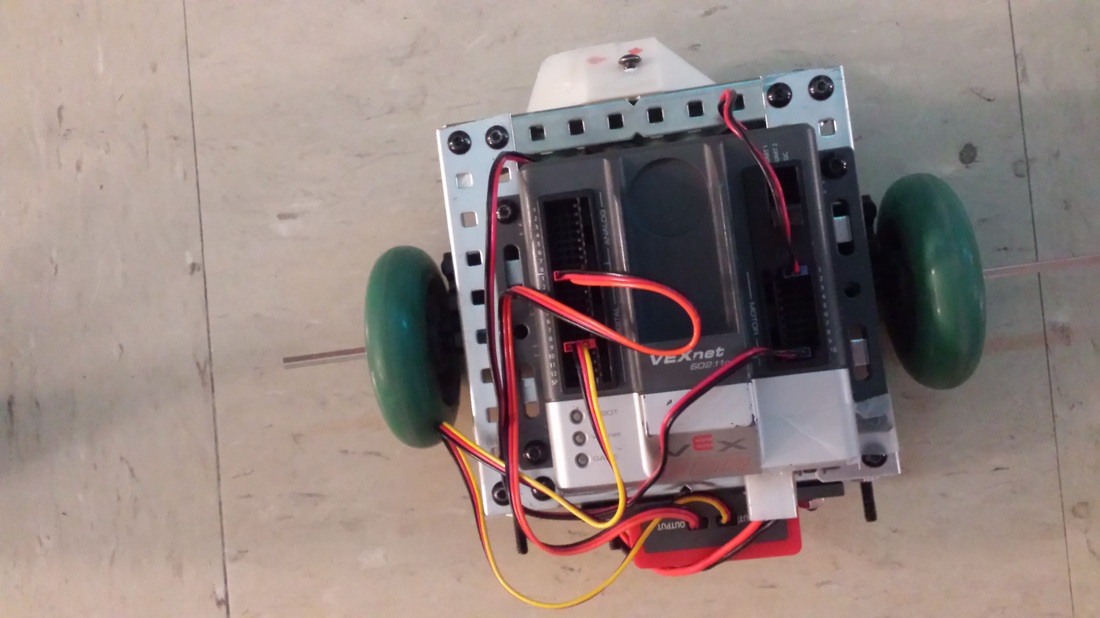
The final robot
|
We picked this design because it is light and fast. We are able to evade bigger robots and push them off when they least expect it. The two wheels allow for shock absorption. This unbalanced nature actually helps it to stay in the fight.
|
